

Featured SIS News

 www.controlglobal.com
www.controlglobal.com 
 www.automationworld.com
www.automationworld.com Featured Automotive News
 Nature
Nature 


 Forbes
Forbes 
 Singularity Hub
Singularity Hub Focus On: Cybersecurity

 RTInsights
RTInsights Focus On: RADAR
 TechCrunch
TechCrunch 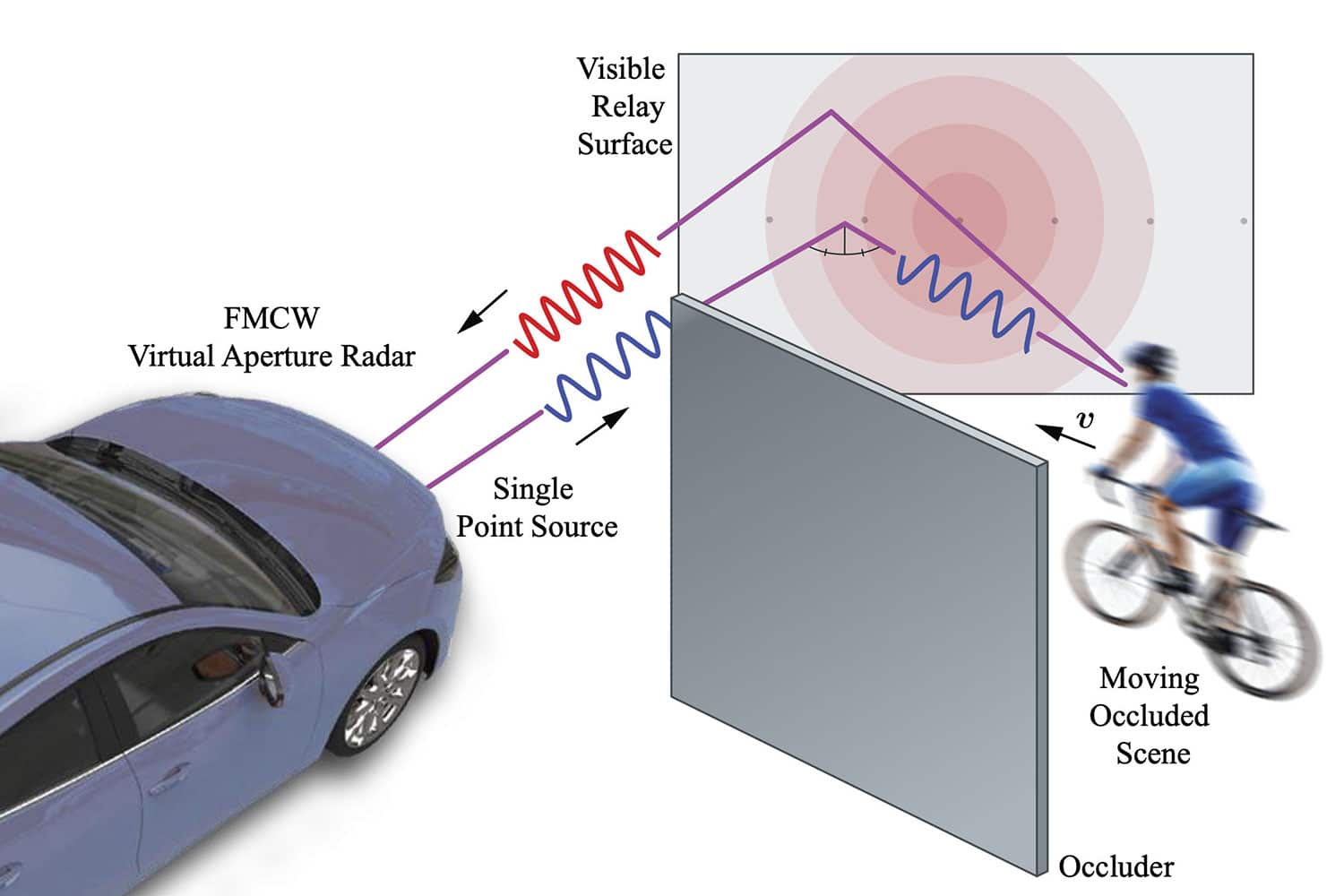
 Inceptive Mind
Inceptive Mind 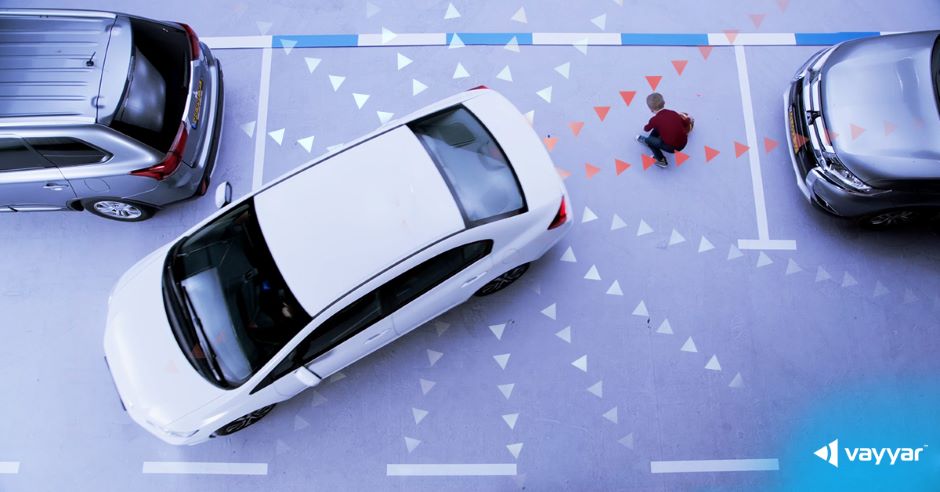
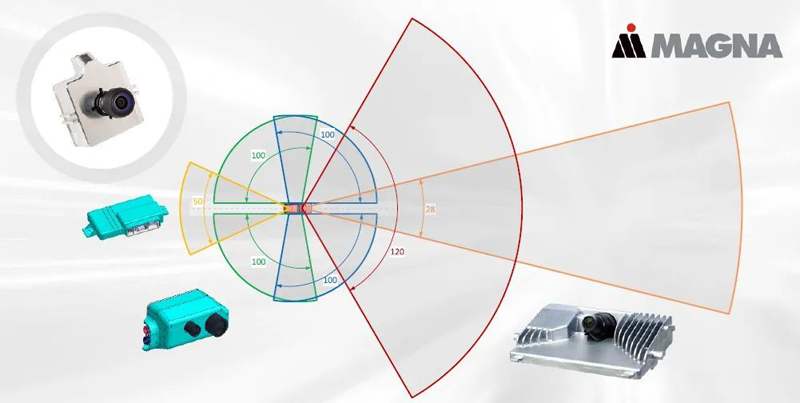
 The Engineer
The Engineer Focus On: LIDAR

 Inside Unmanned Systems
Inside Unmanned Systems 
 TheStreet
TheStreet 
 TNW | Sustainability
TNW | Sustainability Focus On: Cameras


Site Resources

Training
Online training in functional safety, cybersecurity, project management, and more from FSE and our affiliate partners.

Videos
Interesting and educational free videos. Some are produced by FSE, and others are just culled from the internet.

Books
We have scoured the corners of the Internet to find all of the books about functional safety ever published. If a book is not listed here, it either doesn't exist or shouldn't exist!
Our Mission
Functional Safety Engineer.com (FSE) aims to be your go-to source for interesting technical content related to functional safety, including automotive, self-driving cars, and safety instrumented systems (SIS). We also like to dabble in the related areas of cybersecurity, machine learning, and reliability engineering. We aim to provide a mix of original content and links to the best available third party content. Content is updated approximately weekly, so please check back often. Thank you for reading! Please bookmark us and follow us on social media.